Safe human-robot activity
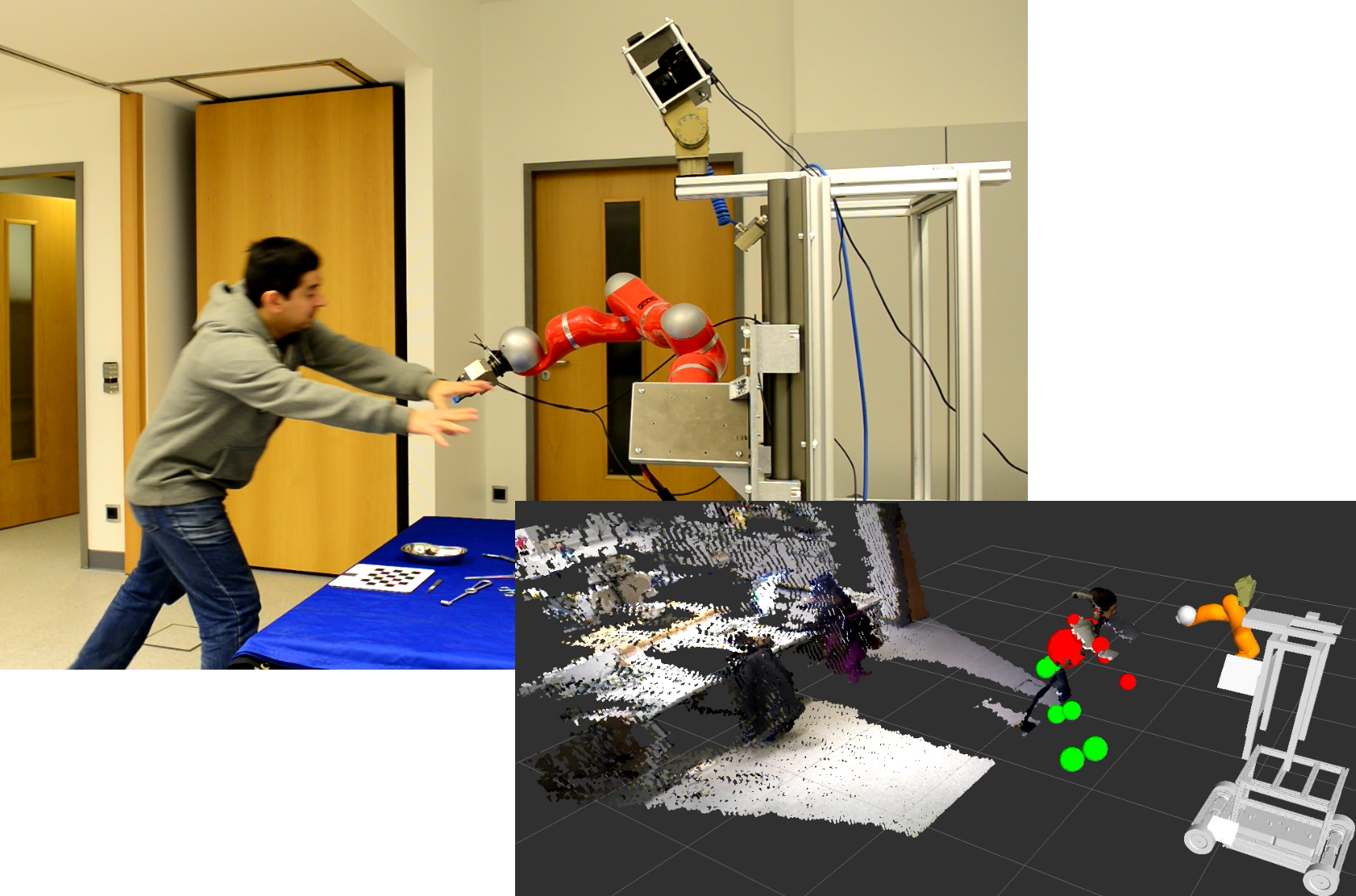
The Safe Human-Robot Activity dataset contains information from an experiment in which a robot shares its workspace with a human co-worker. It contains poses of perceived human body parts, estimated external forces acting on the robot arms, the robot joint state, and semantic descriptions of performed actions and safety reactions. We believe that recalling safety-related events through such a knowledge base will make robots safety-aware.
Knowledge base Publications
Details
The Safe Human-Robot Activity dataset contains information from an experiment in which a robot shares its workspace with a human co-worker. It contains poses of perceived human body parts, estimated external forces acting on the robot arms, the robot joint state, and semantic descriptions of performed actions and safety reactions. We believe that recalling safety-related events through such a knowledge base will make robots safety-aware.
Visualization of a safety-critical event in the knowledge base.
Description of the data
This dataset contains the following data:
- Semantic memory of issued actions, parametrizations, and outcomes from executive to motor controllers
- Motor controller safety reactions: Detected collisions, i.e. strength and detecting sensor, with automatically triggered reactions, e.g. soft stop, hard stop
- 3D position and orientation of all links of the robot over time
- 3D position and orientation of all perceived links of the human co-worker over time
- Meta-data describing the hardware used, the assumed human model, the experiment conducted, a short description, and the experiment’s length
Acknowledgements
The development of the safety-aware knowledge base has received funding from the EU FP7 SAPHARI project: