Open Knowledge for AI-Enabled Robots

WARNING: Deprecated by michael and patrick – michael wants the detail section in the overview page (16.10.2014)
The Safe Human-Robot Activity dataset contains information from an experiment in which a robot shares its workspace with a human co-worker. It contains poses of perceived human body parts, estimated external forces acting on the robot arms, the robot joint state, and semantic descriptions of performed actions and safety reactions. We believe that recalling safety-related events through such a knowledge base will make robots safety-aware.
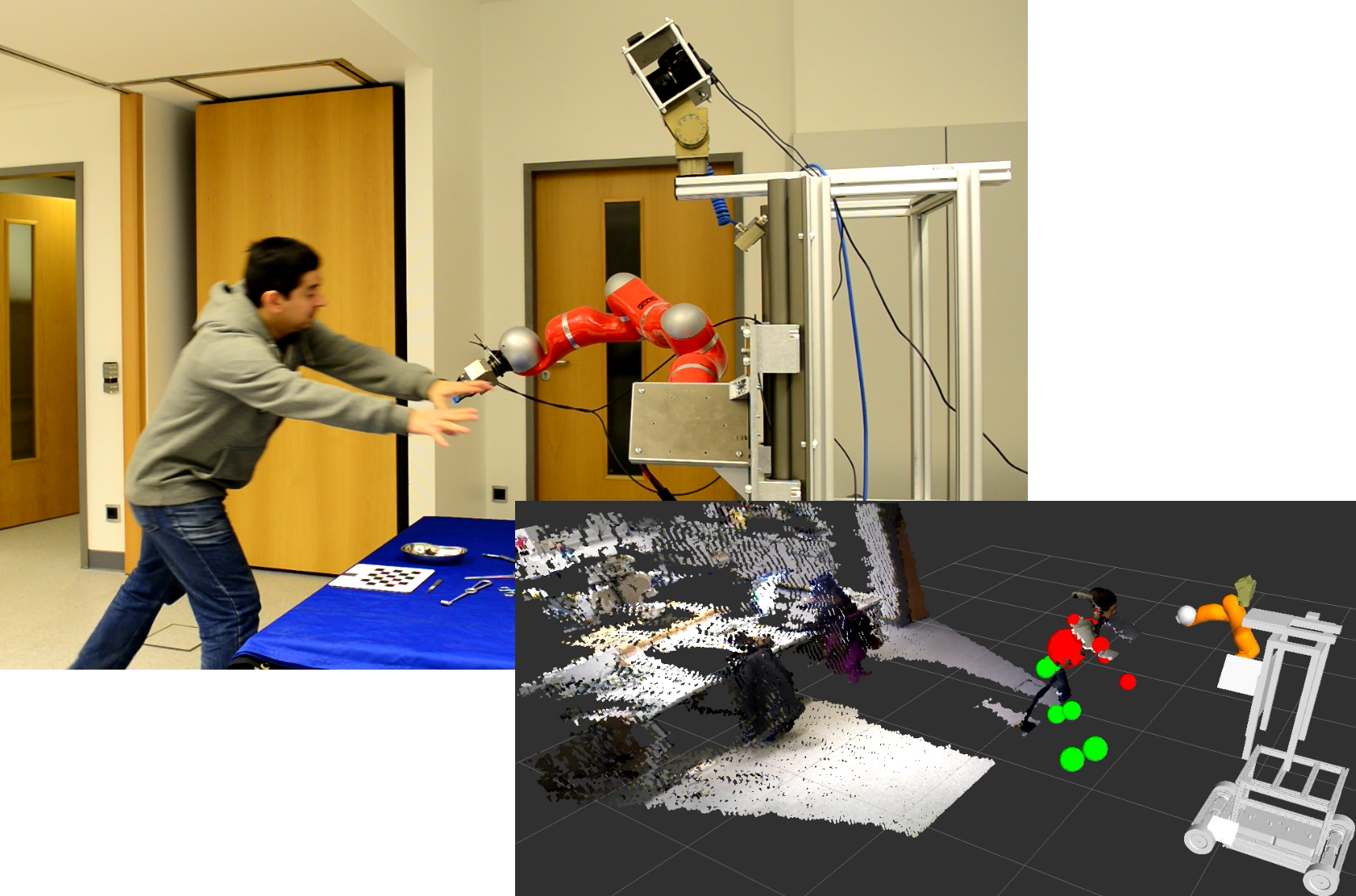
Visualization of a safety-critical event in the knowledge base.
This dataset contains the following data:
The development of the safety-aware knowledge base has received funding from the EU FP7 SAPHARI project:
