Open Knowledge for AI-Enabled Robots

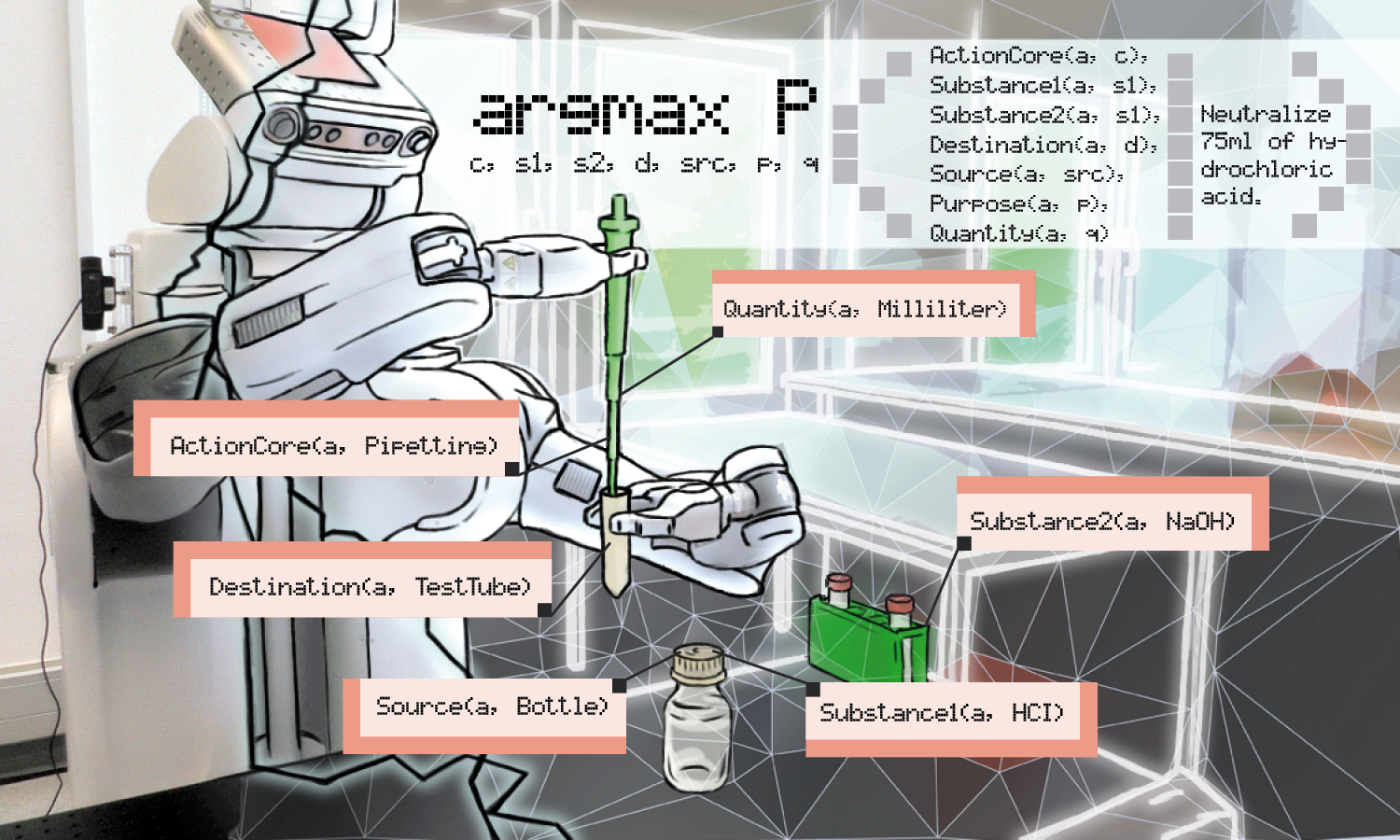
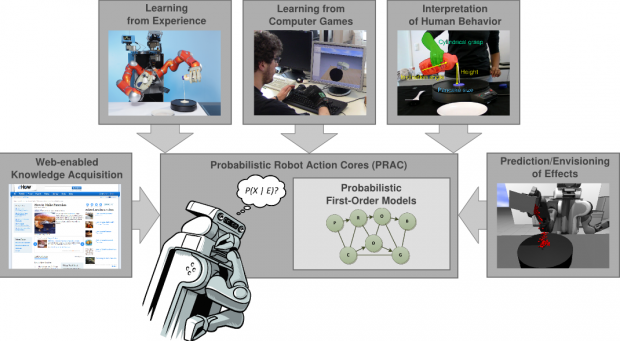
Knowledge about actions and objects is represented as Probabilistic Robot Action Cores (PRAC), which can be thought of as generic event patterns that enable a robot to infer important information that is missing in an original natural-language instruction. PRAC models are represented in Markov Logic Networks, a powerful knowlegde represenation formalism combing first-order logic and probability theory.
This project is partly supported by ACAT and RoboHow:
