Open Knowledge for AI-Enabled Robots

| [1] | Sebastian Koralewski, Gayane Kazhoyan, Michael Beetz, "Self-specialization of General Robot Plans Based on Experience", In Robotics and Automation Letters, IEEE, 2019. [bib] |
| [2] | Gayane Kazhoyan, Michael Beetz, "Executing Underspecified Actions in Real World Based on Online Projection", In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019. [bib] [doi] |
| [3] | Marco Costanzo, Simon Stelter, Ciro Natale, Salvatore Pirozzi, Georg Bartels, Alexis Maldonado, Michael Beetz, "Manipulation Planning and Control for Shelf Replenishment", In IEEE Robotics and Automation Letters, IEEE, vol. 5, no. 2, pp. 1595-1601, 2020. [bib] |
| [4] | Jan Winkler, Georg Bartels, Lorenz Mösenlechner, Michael Beetz, "Knowledge Enabled High-Level Task Abstraction and Execution", In First Annual Conference on Advances in Cognitive Systems, vol. 2, no. 1, Palo Alto, CA, pp. 131-148, 2012. [bib] [pdf] |
| [5] | Jan Winkler, Moritz Tenorth, Asil Kaan Bozcuoglu, Michael Beetz, "CRAMm -- Memories for Robots Performing Everyday Manipulation Activities", In Advances in Cognitive Systems, vol. 3, pp. 47-66, 2014. [bib] |
| [6] | Moritz Tenorth, Michael Beetz, "KnowRob -- A Knowledge Processing Infrastructure for Cognition-enabled Robots", In Int. Journal of Robotics Research, vol. 32, no. 5, pp. 566 - 590, 2013. [bib] [pdf] |
| [7] | Lorenz Mösenlechner, Michael Beetz, "Fast Temporal Projection Using Accurate Physics-Based Geometric Reasoning", In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, pp. 1821-1827, 2013. [bib] |
| [8] | Michael Beetz, Dominik Jain, Lorenz Mösenlechner, Moritz Tenorth, Lars Kunze, Nico Blodow, Dejan Pangercic, "Cognition-Enabled Autonomous Robot Control for the Realization of Home Chore Task Intelligence", In Proceedings of the IEEE, vol. 100, no. 8, pp. 2454-2471, 2012. [bib] |
| [9] | Lorenz Mösenlechner, Michael Beetz, "Parameterizing Actions to have the Appropriate Effects", In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 2011. [bib] |
| [10] | Lorenz Mösenlechner, Nikolaus Demmel, Michael Beetz, "Becoming Action-aware through Reasoning about Logged Plan Execution Traces", In IEEE/RSJ International Conference on Intelligent RObots and Systems., Taipei, Taiwan, pp. 2231-2236, 2010. [bib] |
| [11] | Michael Beetz, Lorenz Mösenlechner, Moritz Tenorth, "CRAM -- A Cognitive Robot Abstract Machine for Everyday Manipulation in Human Environments", In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, pp. 1012-1017, 2010. [bib] [pdf] |
| [12] | Daniel Nyga, "Interpretation of Natural-language Robot Instructions: Probabilistic Knowledge Representation, Learning, and Reasoning", PhD thesis, University of Bremen, 2017. [bib] [pdf] |
| [13] | Daniel Nyga, Michael Beetz, "Reasoning about Unmodelled Concepts -- Incorporating Class Taxonomies in Probabilistic Relational Models", In Arxiv.org, 2015. Preprint [bib] [pdf] |
pracmln is a toolbox for statistical relational learning and reasoning and as such also includes tools for standard graphical models. pracmln is a statistical relational learning and reasoning system that supports efficient learning and inference in relational domains. pracmln has started as a fork of the ProbCog toolbox and has been extended by latest developments in learning and reasoning by the Institute for Artificial Intelligence at the University of Bremen, Germany.pracmln was designed with the particular needs of technical systems in mind. Our methods are geared towards practical applicability and can easily be integrated into other applications. The tools for relational data collection and transformation facilitate data-driven knowledge engineering, and the availability of graphical tools makes both learning or inference sessions a user-friendly experience. Scripting support enables automation, and for easy integration into robotics applications, we provide a client-server library implemented using the widely used ROS (Robot Operating System) middleware.
|
Try out online! Visit the Project Page!
| [14] | Daniel Nyga, Michael Beetz, "Cloud-based Probabilistic Knowledge Services for Instruction Interpretation", Chapter in Robotics Research, Springer, vol. 2, pp. 649-664, 2018. [bib] |
| [15] | Daniel Nyga, Subhro Roy, Rohan Paul, Daehyung Park, Mihai Pomarlan, Michael Beetz, Nicholas Roy, "Grounding Robot Plans from Natural Language Instructions with Incomplete World Knowledge", In 2nd Conference on Robot Learning (CoRL 2018), Zurich, Switzerland, 2018. [bib] [pdf] |
| [16] | Mihai Pomarlan, Daniel Nyga, Mareike Picklum, Sebastian Koralewski, Michael Beetz, "Deeper Understanding of Vague Instructions through Simulated Execution (Extended Abstract)", In Proceedings of the 2017 International Conference on Autonomous Agents & Multiagent Systems, International Foundation for Autonomous Agents and Multiagent Systems, 2017. [bib] [pdf] |
| [17] | Daniel Nyga, "Interpretation of Natural-language Robot Instructions: Probabilistic Knowledge Representation, Learning, and Reasoning", PhD thesis, University of Bremen, 2017. [bib] [pdf] |
| [18] | Daniel Nyga, Mareike Picklum, Sebastian Koralewski, Michael Beetz, "Instruction Completion through Instance-based Learning and Semantic Analogical Reasoning", In International Conference on Robotics and Automation (ICRA), Singapore, 2017. [bib] [pdf] |
| [19] | Daniel Nyga, Mareike Picklum, Michael Beetz, "What No Robot Has Seen Before -- Probabilistic Interpretation of Natural-language Object Descriptions", In International Conference on Robotics and Automation (ICRA), Singapore, 2017. [bib] [pdf] |
| [20] | Daniel Nyga, Michael Beetz, "Cloud-based Probabilistic Knowledge Services for Instruction Interpretation", In International Symposium of Robotics Research (ISRR), Sestri Levante (Genoa), Italy, 2015. [bib] [pdf] |
| [21] | Daniel Nyga, Michael Beetz, "Reasoning about Unmodelled Concepts -- Incorporating Class Taxonomies in Probabilistic Relational Models", In Arxiv.org, 2015. Preprint [bib] [pdf] |
| [22] | Gheorghe Lisca, Daniel Nyga, Ferenc Bálint-Benczédi, Hagen Langer, Michael Beetz, "Towards Robots Conducting Chemical Experiments", In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 2015. [bib] [pdf] |
| [23] | Nicholas Hubert Kirk, Daniel Nyga, Michael Beetz, "Controlled Natural Languages for Language Generation in Artificial Cognition", In IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 2014. [bib] [pdf] |
| [24] | Daniel Nyga, Michael Beetz, "Everything Robots Always Wanted to Know about Housework (But were afraid to ask)", In 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 2012. [bib] [pdf] |
WARNING: Deprecated by michael and patrick – michael wants the detail section in the overview page (16.10.2014)
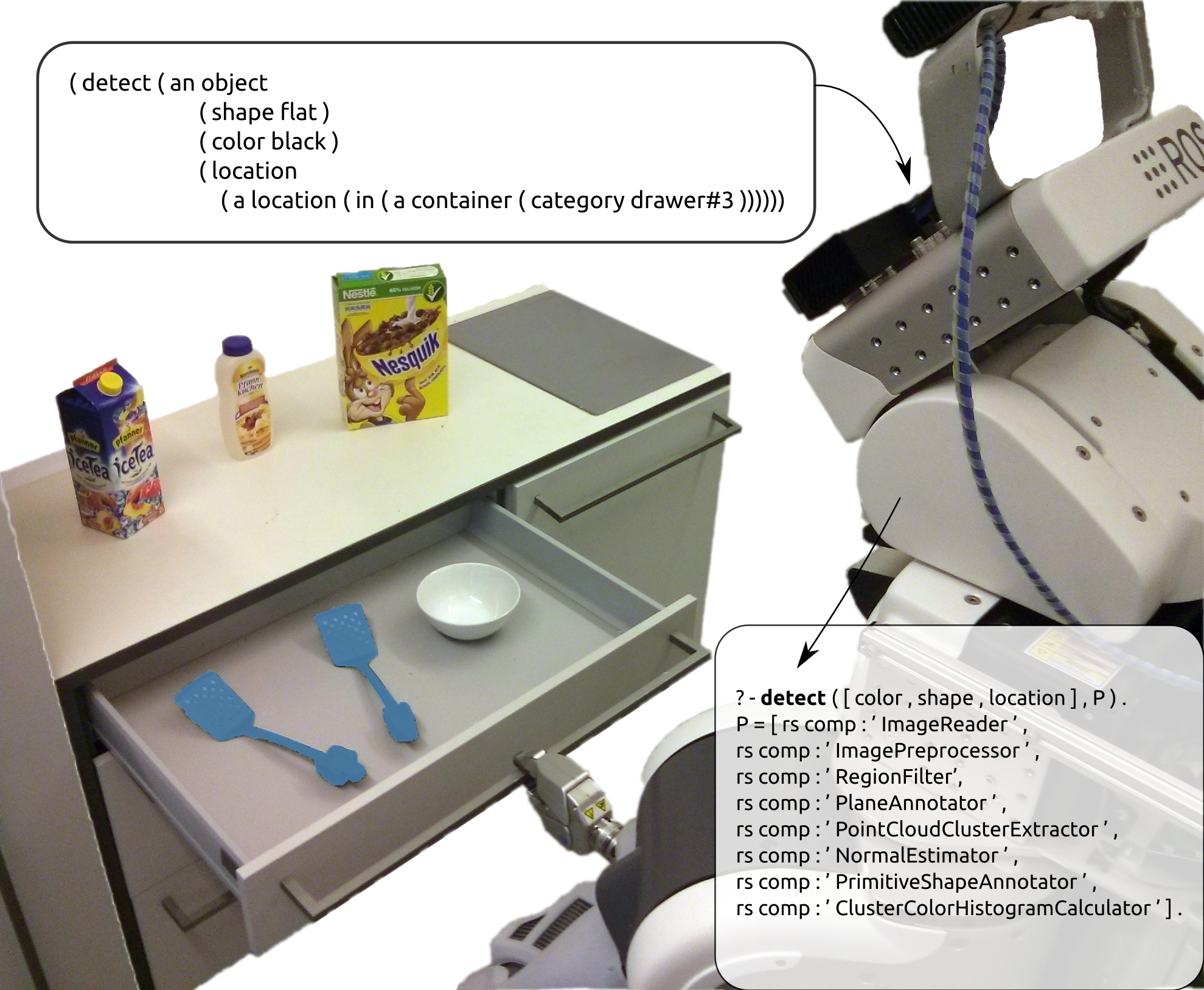
In order for future robots to successfully accomplish more and more complex manipulation tasks, they are required to be action-aware. They need to possess a model which discloses how the effects of their actions depend on the way they are executed. For example, a robot making pancakes should have an understanding of the effects of its actions: pouring the pancake-mix on the oven depends on the position and the way the container is held, or that the consequence of sliding a spatula under a pancake may or may not cause damage to it, depends on the angle and the dynamics of the way it is pushed. In artificial intelligence these are considered to be naive physics reasoning capabilities.

Setup of the virtual environment game
Our current gaming setup is depicted in the figure above. The system is provided with a sensor infrastructure that allows interaction with the virtual world by tracking the players’ hand motion and gestures and mapping them onto the robotic hand in the game. We tested out two different setups for the tracking. One with the help of a magnetic sensor based controller, which returns the position and orientation of the hand, together with a dataglove for finger joints positioning. In the second case we used two 3D camera sensors mounted on a frame which yields the pose and the skeleton of the tracked hand.
This dataset contains the following data:
WARNING: Deprecated by michael and patrick – michael wants the detail section in the overview page (16.10.2014)
The Safe Human-Robot Activity dataset contains information from an experiment in which a robot shares its workspace with a human co-worker. It contains poses of perceived human body parts, estimated external forces acting on the robot arms, the robot joint state, and semantic descriptions of performed actions and safety reactions. We believe that recalling safety-related events through such a knowledge base will make robots safety-aware.
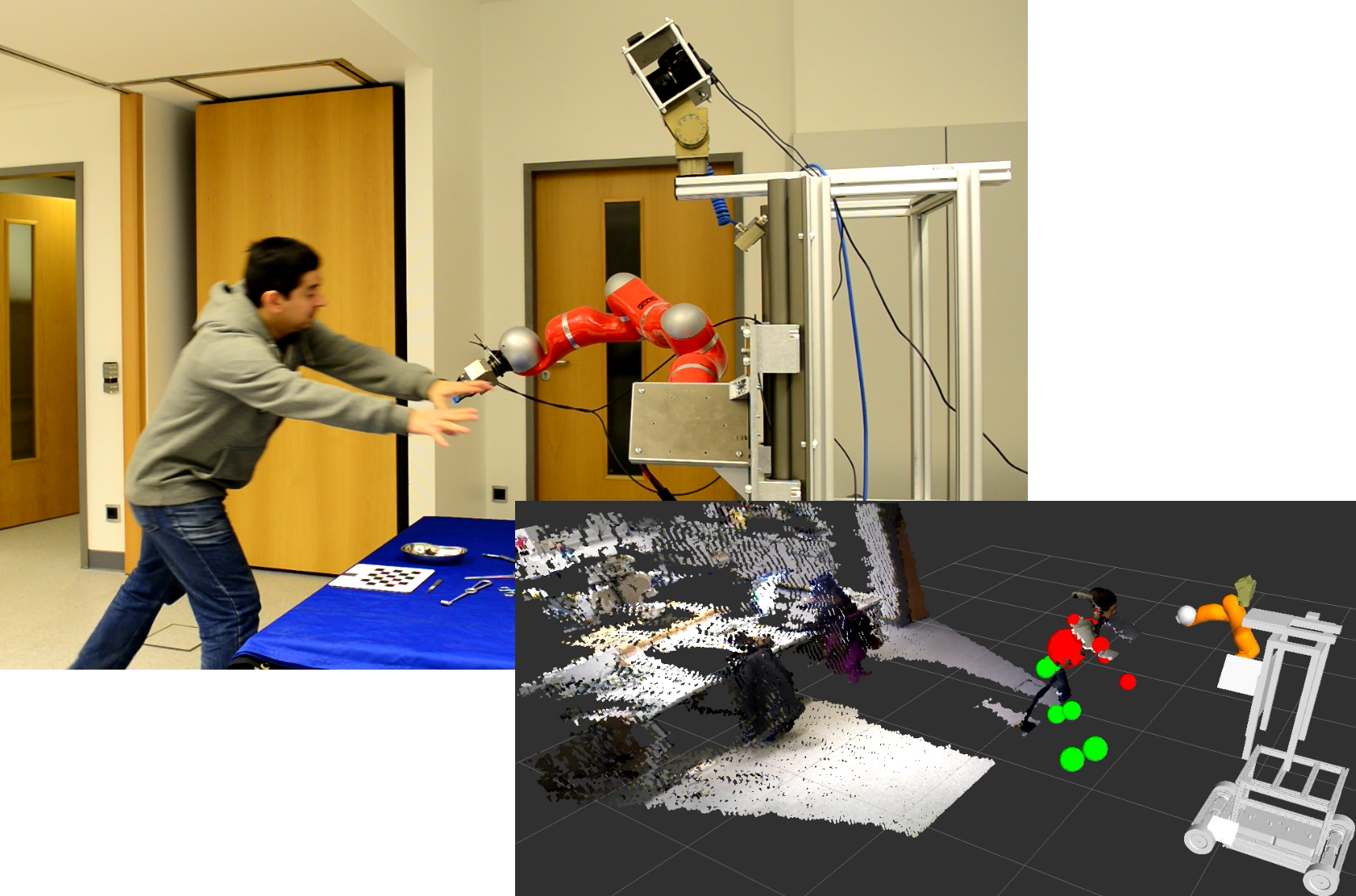
Visualization of a safety-critical event in the knowledge base.
This dataset contains the following data:
The development of the safety-aware knowledge base has received funding from the EU FP7 SAPHARI project:

We are currently working on the knowledge base for this experiment.