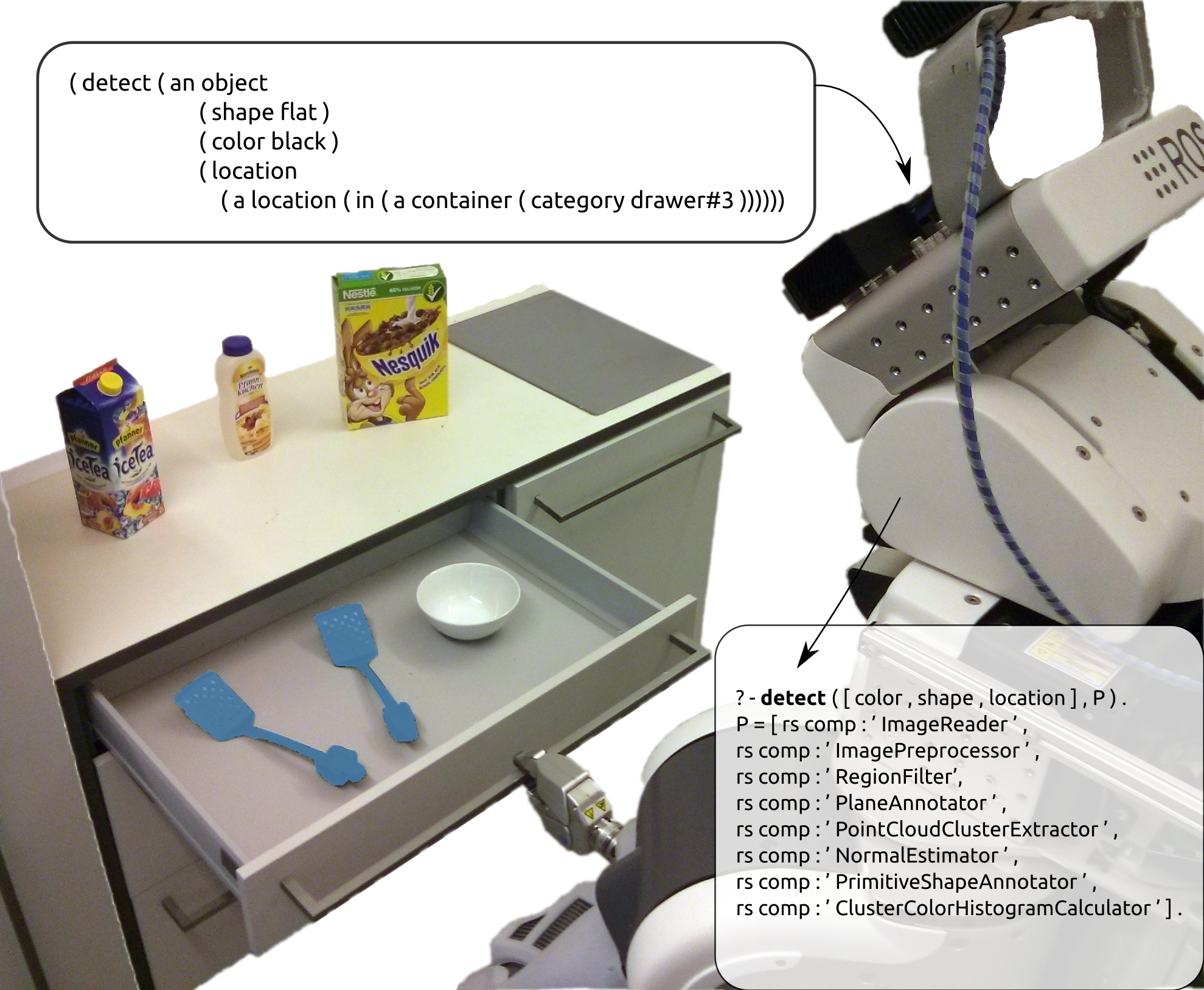
Robotic perception needs to go beyond object detection/recognition. Robots working in a human environment face the challenge of recognizing a wide variety of visual characteristics and affordances during the execution of a task, and answer queries that potentially go beyond what is directly perceivable (e.g. is this object a container, or does this object have a lid). We address this problem by extending RoboSherlock to enable knowledge-based reasoning about which of its perceptual experts it should run, given a task description, and also reason about the objects that it has recognized, to further examine them.Example queries implemented can be tried out
here. Currently only reasoning capabilities are shown, live execution of RoboSherlock on logged data will be added shortly.